実験・実習
電子制御工学科における実験実習の特徴
- 1年から5年まで一貫した実験実習を実施
- 低学年ではロボット製作の可能なブロックセットなども利用し、ものづくりへの導入教育・基礎教育に重点をおき、学年とともに高度な内容にステップアップ
- 様々な技術分野を横断し、総合的な力を身に付けられるような計画された総合実験実習の実施
- 企業等で必要な技術者としての基礎力や社会性を養う実務訓練の実施
電子制御工学科の教育課程において実験実習は大きな割合を占めます。講義と連動した様々なテーマの実験実習により、実体験による工学への深い理解とともに、実践力を身につけることができます。
各実験実習の概要は以下の通りです。
- 電子制御工学実験I(1年次)

- 電子制御工学実験II(2年次)
- 工学実験実習(3年次)
- 総合実験実習(4年次)
- 電子制御工学実験III(5年次)
- 実務訓練
- 卒業研究
- 設計製図I~III
| 課題名 | 内容 | クリックで拡大 |
|---|---|---|
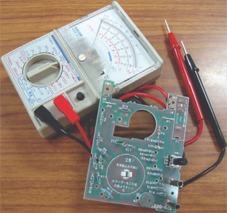
| 電気工学実験1 | キットテスタの組立て通じてはんだ付けの基本や電気部品の取り扱いを学びます。学生1名に1台です。(学生の個人負担ですが十分な性能ですので仕事でも生活でも長期間使えます) | |
| マイコン内蔵ブロックによるロボット制御 | 有名なレゴブロックのマイコン内蔵版を使い、ロボットの製作から所定の動作を実現するためのプログラムを作成します。 | |
| テスタの調整と 試験 |
組立てたテスタの調整と試験を行ないます。 調整や試験には精度の高い計測器が必要です。 基本的な計測器の使い方を学びます。 |
 |
| 電気工学実験2 | (1)直流電圧計の試験 (2)交流電圧計の試験 (3)直流電流計・抵抗計の試験の3テーマを行ないます。 測定機器の使い方の基本を学習します。 |
|
| 電気工学実験3 | (1)オームの法則 (2)抵抗接続 (3)電位と電位差の3テーマを行ないます。 電気回路の最も基本となる法則や現象を学習します。 |
|
| 電気工学実験4 | (1)最も簡単なラジオ (2)リレーによる電車の制御の2テーマを行ないます。基本的な目標はものをつくるまたは動かすです。電気や電子部品を取り扱うための基本知識を学びます。 |
| 課題名 | 内容 | クリックで拡大 |
|---|---|---|
| 電圧計と電流計の構成 | 電圧計と電流計の構造について学び、電圧計や電流計が設計できるようになります。 | |
| 直流電力の測定 | 電力測定の意味や消費出ん職の測定方法等について学びます。 | |
| 直流回路の基本定理1,2 | 直流回路において重要なキルヒホッフの法則やテブナンの定理を実際の電気回路の上で確認します。 | |
| レゴブロックによる機械制御 | 与えられた課題を実現するようにレゴブロックを用いてロボットを作成します。 動作手順の考え方等コンピュータプログラムを記述するために重要な考え方を学びます。 |
|
| 各種計器の取扱い | (1)直流電位差計 (2)指針型検流計 (3)各種電圧系の比較の3テーマを行ないます。 各種計器を用いて様々な電気現象を測定する方法や、計器による測定値の違いなどを学習します。 |
|
| 抵抗測定 | 抵抗の測定方法としてホイートストンブリッジによる測定を行ないます。 | |
| 直流小型電動機(DCモータ)の特性測定 | 電気エネルギを運動エネルギに変換するモータの動作原理や回転数、トルクと投入電力の関係を求めます。 | |
| オシロスコープの使用法 | オシロスコープは時間軸上で変化する信号の状態を見る測定器です。 様々な電気現象を観察する方法を学び、測定に使えるようになります。 |
|
| 交流回路1,2電力計 | コイルやコンデンサの測定方法、RC回路やRLC回路の挙動を測定したり、交流電力の測定を行ないます。交流回路に関連する講義の実技を行なうものです。 |
| 課題名 | 内容 | クリックで拡大 |
|---|---|---|
| 鋳造の基本作業 | 鋳造は、溶解した金属を鋳型に流し込んで機械部品の素材等を作る場合に用いられる加工法です。ここでは砂型を製作して溶解したアルミ合金を流し込み、製品が出来上がるまでの工程や、様々な型の製造方法を学びます。 | |
| 溶接の基本作業 | 溶接は金属同士を溶融して接合し、機械構造体などを製作する方法です。 ここではガス溶接、被覆アーク溶接、CO2溶接などを行ない、溶接の基本作業を習得します。 |
|
| 旋盤の基本作業 | 旋盤は工作物を回転させながらそこに刃物をあてて削る作業を行なう工作機械です。ここでは工作物に対して外丸削り、端面削り、溝入れ、ねじ切り等、旋盤で行なわれる基本作業を習得します。 | |
| フライス盤の基本作業 | フライス盤は、工具(刃物)を回転させながら、工作物を移動させて所定の平面や溝等を削り出す工作機械です。ここでは(1)立てフライス盤、横フライス盤を用いた基本作業と、(2)NCフライス盤による基本作業の2つを習得します。 | |
| ラジアルボール盤、立てフライス盤の基本作業 | ラジアルボール盤は大型のボール盤ですが、単なる穴あけだけでなく様々な用途に使える工作機械です。ここではラジアルボール盤について、ねじ立て、リーマ仕上げ等の基本作業を習得します。立てフライス盤は平面などを削る工作機械です。ここでは鋳鉄と鋼の平面加工などの基本作業を習得します。 | |
| 材料の引張試験 | 金属材料の強度を測定する方法として引張試験があります。材料を最大5tまで試験機に装着して引っ張りながら切れるまで引っ張ります。こ の時、引っ張る力の変化や材料の形から、材料の引張強度を求める方法を習得します。 | |
| 金属の熱処理と組織観察 | 鋼の焼入れ、焼なまし等熱処理(加熱、冷却)したときの顕微鏡組織の変化を観察し、顕微鏡組織と強度の関係を学びます。 | |
| 空気圧シーケンス制御 | 空気圧で動くシリンダと電磁バルブを用い、あらかじめ決められた手順通りにこれらを動かす回路を電磁リレーで構成します。古典的なシーケンス制御ですがシーケンス制御の考え方を理解できます。 | |
| 半導体素子の特性試験 | 半導体素子を取扱う上で、それらの特性を理解しておく必要があります。ここではトランジスタの特性試験を行なうほか、OPアンプを用いた増幅器の設計を行ない、半導体素子の取扱いについて基本的な事項を習得します。 |
この実験実習では、無人搬送車(ライントレースカー)を動かすまでの課程に おいて次の4点を教育の重点目標としています。
- 機械設計、機械加工に関する基礎的な知識の習得
- 制御用マイクロプロセッサおよび周辺回路設計法の習得
- 制御用プログラム開発手法の習得
- いくつかの技術要素が組み合わされた対象を造り上げる総合力
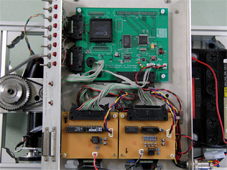
この実験実習では、ハンドル・走行ユニットの設計および製図を行ない、実際に作ります(写真前方のタイヤのついている部分です)。さらに、この図面に基づいて、部品を加工して組み立てます。搬送車を床上ラインに沿って走行させるためには、マイクロコンピュータを使います。マイクロコンピュータにはモータに指令を送ったり、センサの状態を読み出すための様々な入出力回路が 取り付けられています(写真右)。
これらを製作て動作を確認し、実際の要求仕様であるライントレースを実現するためマイクロコンピュータを動かすプログラム(組込プログラム/組込ソフトウエア/ファームウエアなどと呼びます)を開発します。この実験実習における機械系の教育目標は、(1)機構部を設計して設計図面を作成できる、(2)自ら描いた図面に基づいた部品加工を行ない、精度評価や組立て後の機能評価で設計の妥当性を考えることができる、の2点です。
次に制御・コンピュータの関する教育目標は、(1)マイクロコンピュータを用いた機械制御において、制御用入出力回路の設計ができる、(2)プログラムを用いて機械装置を動かすための考え方や、必要となる演算法が理解できる、の2点です。
これらの2つの項目をさらに総合的に見て、出来上がった機械装置の改良点や問題点指摘できるようになることを目標とし、機械系の設計では4年次の設計製図と、制御・コンピュータ系では4年次のマイクロコンピュータIIIを連係しながら実験実習をすすめてゆきます。
| 課題名 | 内容 | クリックで拡大 |
|---|---|---|
| 無人搬送車の設計 | このテーマは4年次の設計製図にて行ないます。既存の無人搬送車における走行部(ハンドル、走行ユニット)の採寸から組立図の作成、実際の自分で加工することを考慮しながら、寸法公差や幾何公差の入れられた部品図まで作図します。写真は設計製図の風景です。 | |
| ソフトウエア開発1 | ソフトウエア開発1は12週行なわれます。主な内容は(1)制御用入出力回路の製作(2)入出力回路の動作確認(マイクロコンピュータの動作をオシロスコープ等で観察)(3)制御に必要なプログラム作成方法等です。これらを通じて、マイクロコンピュータ周辺回路設計法の基本的考え方や、制御に必要なプログラム技術等を学びます。 | |
| ソフトウエア開発2 | ソフトウエア開発2は6週行なわれます。この6週間で要求仕様であるライントレースを実現します。4~5名の共同作業で、1台の搬送車制御プログラムを作成します。(もしも6週で終らなければ….) | |
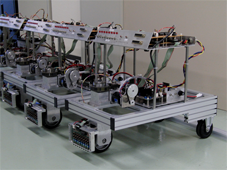
| 機構部品の製作と組立て | 自ら設計した図面に基づき、工作機械を使用して部品を作り出します。4~5名で1台の搬送車の走行ユニット(写真)を製作します。加工する部品は1人1つです。部品加工は4週で行ない、2週で最終的な加工や組立て・調整を行ないます。 |  |
| 走行会 | 実習の最後は走行会です。ここで、指定したコースを完全に周回できれば単位がもらえます。走行会ではプログラムの不具合や組立ての不備による動作不良も出ることがあります。走行会ではこのような問題や搬送車そのものの構造的問題、制御的な考え方や問題について話し合います。 | 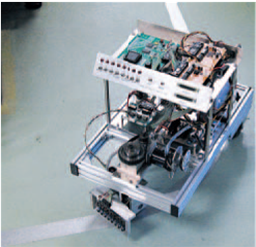 |
| 課題名 | 内容 | クリックで拡大 |
|---|---|---|
| 搬送制御実験 | PLC(プログラマブルロジックコントローラ/シーケンサ)を用いて、機械装置をあらかじめ決められた手順通りに制御するプログラムを製作し ます。工場等で多用されているPLCを使った機械装置の制御方法を学びます。なお、対象の機械装置は、空気圧アクチュエータをベルトコンベアで物体を搬送しながら、形状別に分類するものです。 | |
| 分布型光ファイバセンサの実験 | 光ファイバを用いて物体の変形などを高精度に測定する新しい技術について、波長の異なる光を用いた測定方法の基本原理について学びます | |
| フィードバック制御系の設計と評価 | フィードバック制御は、目標値と現在の位置をできるだけ一致させるようにする制御方法です。 ここでは制御系の設計方法について学習します。 |
|
| 台車の位置制御と解析 | モータで動く台車を用いてフィードバック制御系を構成し、制御パラメタと挙動の関係などについて学習し、制御系を最適な状態にするため の方法を学びます。 | |
| 有限要素法による材料変形解析 | 有限要素法は様々な現象の解析に用いられる方法です。ここでは材料に力を与えた時の変形や、力のかかる様子などを数値計算で求める方法を学びます。 | |
| A/D,D/A変換 | コンピュータを用いて自然界に存在する様々な現象を測定する時に、電圧などの時間的変化をコンピユータに読み込むためにはディジタル値に変換する必要があります。このような変換デバイスの特性や使い方、ディジタル信号に変換する時の注意点などについて学びます。 |